
バッテリー駆動向け 負荷スイッチ付3.3V昇圧コンバータTPS610986
今回はTexas Instrumentsの超低消費電力のロードスイッチ付き昇圧型3.3V出力DC-DCコンバータ TPS610986を紹介します。
はじめに
昨今流行りのIoTデバイスを作る際、大きな問題となるのが電源です。
なぜならIoTでは多くの場合、デバイスが分散配置されるかポータブルアプリケーションであるため、電源配線が不可能であり、また電池交換がコスト的にも手間的にも忌避されるためです。
したがって多くのIoTデバイスでは、無線通信機能を有すること、小型軽量であること、バッテリー駆動であること、長電池寿命であることが求められます。
デバイスを長寿命化するためには、センサやGPSの情報の取得・通信するタイミングでのみデバイスを起動し、それ以外の時間はスリープするシステムである必要があります。
前者のデバイス起動時の電力(動作時電力)を小さくするためには、システムの起動周期を長くすることや動作時間を短くすること、低消費電力のセンサを利用することで改善できますが、起動周期の変更はアプリケーションの仕様の変更が必要となります。
一方、後者のスリープ時の電力(待機時電力)を小さくするためには、マイコンのスリープ機能を利用したり、ロードスイッチICを利用してセンサや無線通信モジュール等のサブシステムへの電源供給を断つことで改善でき、こちらは本質的な機能の変更は不要です。
よって、IoTデバイスの電池寿命を長くするためには、まずは待機時電力を下げる工夫をするのが良いでしょう。
ロードスイッチを利用しサブシステムへの電力供給を調整できるシステムの場合、待機時に必要となる電流は以下の要素の合計となります。
- ロードスイッチの静止電流
- マイコンのスリープ時電流
- 電源ICの静止電流
- その他リーク電流
ロードスイッチの静止電流に関しては、元々ロードスイッチは消費電流を抑える目的に使用されるため静止電流が極めて小さくなるようICが設計されており、ほぼ無視できます。 (例えばVishayのSIP32431の静止電流は1nA以下です)
マイコンのスリープ時電流については低消費電力を謳っているマイコンを選定することでかなり抑えることができます。
例えばSTM32L4マイコンのSTOP2モードを使用した場合、約1.4μAと非常に低消費電流です。
参考:STM32L4-PWR
以上より低消費電流のマイコンを選定した場合、待機時電流の中で支配的になるのは電源ICの静止電流となり、この部分をいかに抑えられるかで電池寿命が決まります。
また小型軽量化するためには、バッテリー本数やそれ自体の重さを抑える必要があるため昇圧型DC-DCコンバータを使用する方がよいでしょう。
そこでオススメしたいのがTPS610986です。
TPS610986の特徴
TPS610986の静止電流は1μA程度(ローパワーモード時)と非常に低く、また電源電圧が0.7Vから動作するため、コイン電池1個、もしくはアルカリ/ニカド/ニッケル水素乾電池1~2本で駆動できます。
この1μAという値は、一般的に世に出回っている昇圧コンバータモジュール、例えばPololu 3.3Vステップアップ電圧レギュレータ NCP1402の静止電流:1mAのわずか1/1000であることを考えると非常に小さいといえます。
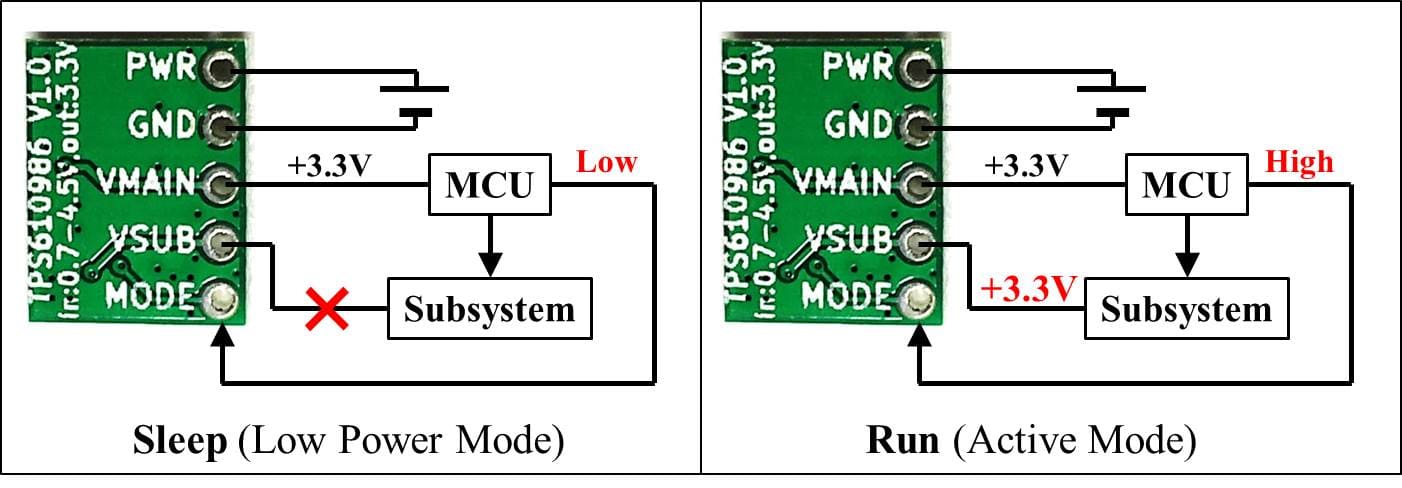
さらに、TPS610986はロードスイッチ機能付きであり、MODEピンを利用することでVSUBピンのON/OFFの切り替えとローパワーモード(超低静止電流)/アクティブモード(高過渡応答)の選択が可能です。
よって、以下の図に示すように、常時出力のVMAINピンをマイコン(MCU)に繋ぎ、VSUBピンをその他のサブシステム(センサ、GPS、無線モジュール、SDカード等)に接続すると、スリープ時はローパワーモードでマイコンのみに電力を供給することで電池寿命を延ばし、動作時はアクティブモードでサブシステムにも高過渡応答の安定的な電力を供給する、といったことが可能です。
TPS610986の仕様
- 入力電圧:0.7V~4.5V (※3.3V以上入力した場合はパススルーとなります)
- 出力電圧:3.3V
- 最大スイッチング電流:350mA (※最大出力電流は入力電圧と効率に依存します) – ロードスイッチ付
- 効率
- 88% (入力電圧2V~3.3V、負荷10μA、ローパワーモード時)
- 93% (入力電圧2V~3.3V、負荷5mA~100mA)
TPS610986搭載モジュール
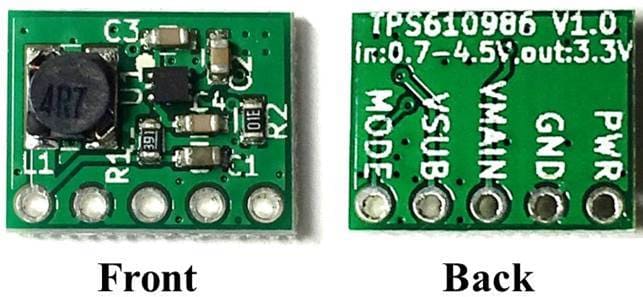
TPS610986は1.5mm×1.5mmの6 pin WSONという微小な表面実装パッケージのため、手軽に使うのが難しいと思います。
そこで、TPS610986の動作に最低限必要な部品を実装し2.54mmピッチ化した昇圧モジュール基板を作成しました。(サイズ:横12.7mm、縦10.0mm)
回路設計にはKiCadを使い、ELecrow PCBAを利用して基板製造・部品実装を委託し(参考:Elecrow PCBAの使い方)、スイッチサイエンスで委託販売しています(参考:委託販売の方法)。
もちろん表面実装部品は全て実装済みですので、ストレートもしくはライトアングルの2.54mmピッチのピンヘッダをはんだ付けするだけで使うことができます。
TPS610986 超低消費電力 3.3V出力昇圧モジュール (税込850円)
基板のCADデータ(KiCad)はこちらのGitHubページに上げています。
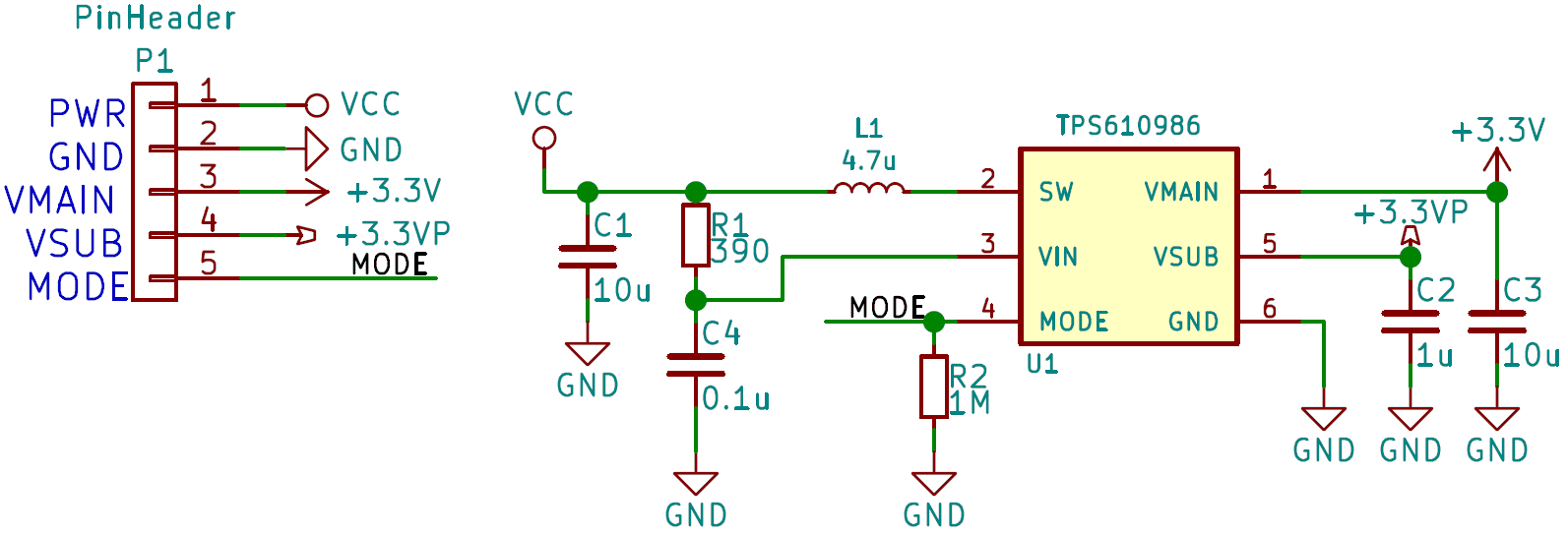
モジュールの回路図
性能評価
静止電流
ローパワーモードとアクティブモード時の入力電圧と入力電流の関係をプロットしました。

ローパワーモード時の静止電流は約1μAであることが見て取れます。
整定時間
DC-DCコンバータの静止電流の重要性は既に述べましたが、整定時間(電圧が安定するまでの時間)もバッテリーの長寿命化には重要です。
なぜなら、アクティブモードにする際にダラダラ電圧が立ち上がる場合、アクティブモードに切り替えてからサブシステムを動かし始められるまでに要する時間が長くなり、動作時の処理時間が延びるため動作時電力が大きくなってしまうからです。
(余談ですが、センサ等のアナログ値を読む必要のある省電力アプリケーション設計の難しい点はこの整定時間だと思います。
センサの精度(S/N比)を上げるためにはノイズの影響を低減しアナログ電源の質を上げるため、電源ラインのLCかRCフィルタの時定数を上げたいわけですが、これを上げると整定時間が延びることになるため電池寿命は悪化します。
つまり精度と電池寿命はトレードオフの関係にあり、このバランスをうまい具合に取るのが設計者の腕の見せ所だと思います。)
さて、ここでは電源としてNi-Mh電池を2本直列に並べて電源として供給した場合の、負荷の有無とVMAINおよびVSUBピンの電圧の整定時間を計測しました。
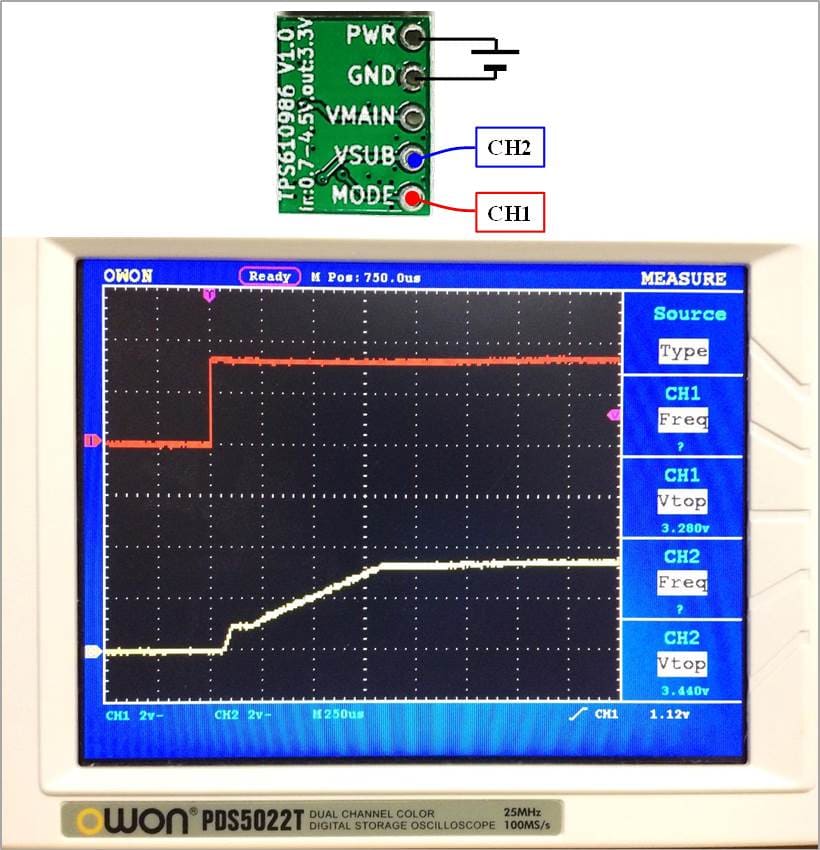 VSUBピンの整定時間(負荷:無し):約800μs
VSUBピンの整定時間(負荷:無し):約800μs
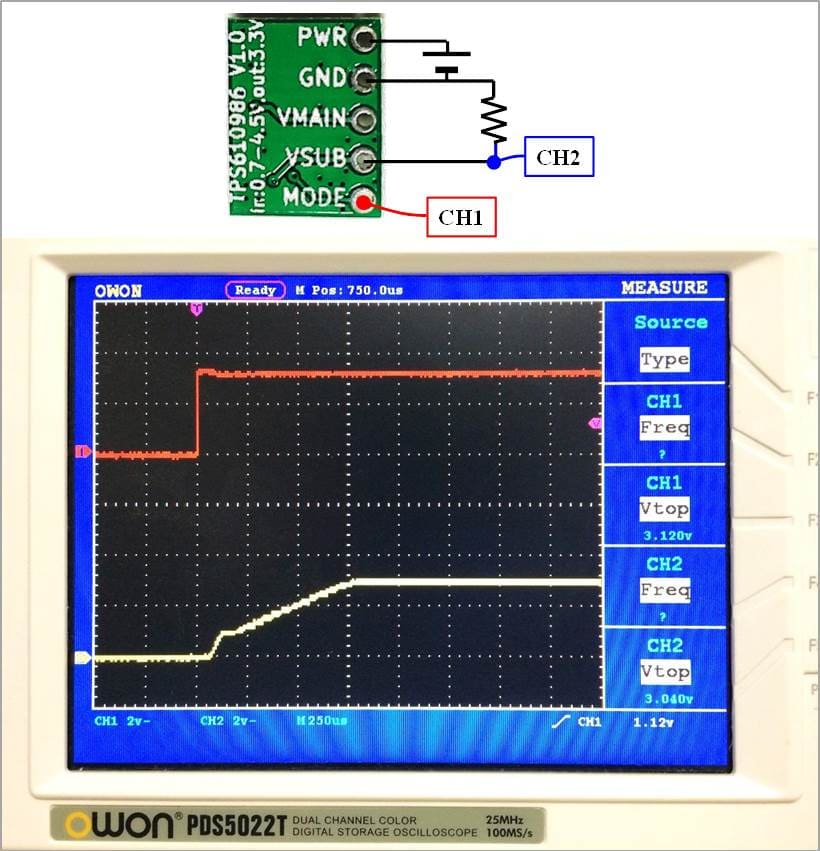 VSUBピンの整定時間(負荷:210mA):約760μs
VSUBピンの整定時間(負荷:210mA):約760μs
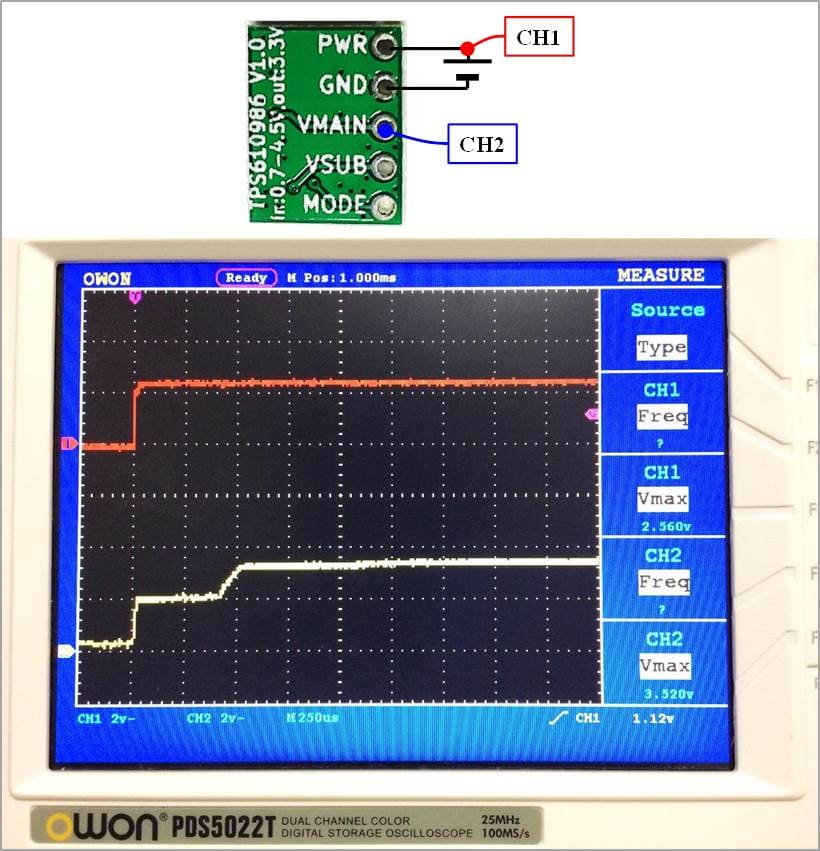 VMAINピンの整定時間(負荷:無し):約580μs
VMAINピンの整定時間(負荷:無し):約580μs
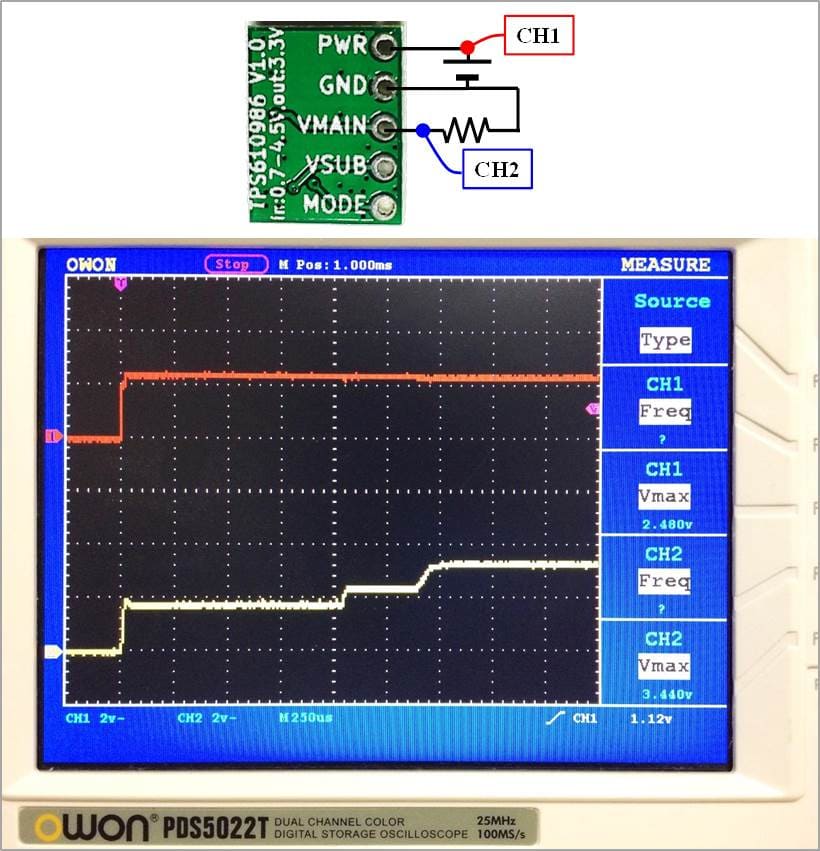 VMAINピンの整定時間(負荷:210mA):約1500μs
VMAINピンの整定時間(負荷:210mA):約1500μs
以上より、どの場合であっても2ms以内には電圧が立ち上がっており、これは実用上大きな問題にはなりません。
電池寿命計算
TPS610986を使った場合、具体的にどれくらいの電池寿命となるのかを計算してみます。 ここでは以下の条件で計算します。
- バッテリー:単4 Eneloop × 直列2本 (容量:750mAh、自然放電率:30%)
- 起動周期:1h
- 動作時バッテリー電流:50mA
- 動作時間:1s
- スリープ時バッテリー電流:5μA (TPS610986 + STM32L4のSTOP2モードを想定)
平均電流は、5μA + 50mA × 1s ÷ 3600s ≒ 18.9μA
よって電池寿命は、750mAh × 70% ÷ 18.9μA ≒ 27778h ≒ 3.17年
となり、数年以上の電池寿命となります。
比較のために、Pololu 3.3Vステップアップ電圧レギュレータ NCP1402を使用しスリープ時バッテリー電流が1mAの場合の寿命も計算してみます。
平均電流:1mA + 50mA × 1s ÷ 3600s ≒ 1.01mA
電池寿命:750mAh × 70% ÷ 1.01mA ≒ 520h ≒ 22.7日
となり、TPS610986とは雲泥の差があることがわかります。
まとめ
今回はロードスイッチ付き昇圧型3.3V出力DC-DCコンバータ TPS610986を紹介しました。
モジュールの性能評価を行い、ローパワーモード時の静止電流は約1μA、電圧整定時間も2msに収まっていることを確認しました。
また、電池寿命計算を通してTPS610986を使うことで数年単位の電池寿命を実現できることを示しました。
